دوشنبه, ۱۰ اردیبهشت, ۱۴۰۳ / 29 April, 2024
مجله ویستا
آشنایی با روباتیک

روبات یك ماشین الكترومكانیكی هوشمند است با خصوصیات زیر:
▪ می توان آن را مكرراً برنامه ریزی كرد.
▪ چند كاره است.
▪ كارآمد و مناسب برای محیط است.
● اجزای یك روبات:
▪ وسایل مكانیكی و الكتریكی:
ـ شاسی، موتورها، منبع تغذیه، ...
ـ حسگرها (برای شناسایی محیط):
ـ دوربین ها، سنسورهای sonar، سنسورهای ultrasound، ...
▪ عملكردها (برای انجام اعمال لازم)
ـ بازوی روبات، چرخها، پاها، ...
▪ قسمت تصمیم گیری (برنامه ای برای تعیین اعمال لازم):
ـ حركت در یك جهت خاص، دوری از موانع، برداشتن اجسام، ...
▪ قسمت كنترل (برای راه اندازی و بررسی حركات روبات):
ـ نیروها و گشتاورهای موتورها برای سرعت مورد نظر، جهت مورد نظر، كنترل مسیر، ...
● تاریخچه روباتیك:
▪ ۲۷۰ ق م :
زمانی كه یونانیان به ساخت مجسمه های متحرك میپرداختند.
▪ حدود سال ۱۲۵۰ م:
بیشاپ آلبرتوس ماگنوس (Bishop Albertus Magnus) ضیافتی ترتیب داد كه درآن، میزبانان آهنی از مهمانان پذیرایی می كردند. با دیدن این روبات، سنت توماس آكویناس (Thomas Aquinas) برآشفته شد، میزبان آهنی را تكه تكه كرد و بیشاب را ساحر و جادوگر خواند.
▪ سال ۱۶۴۰ م:
دكارت ماشین خودكاری به صورت یك خانم ساخت و آن را Ma fille Francine " می نامید.این ماشین كه دكارت را در یك سفر دریایی همراهی می كرد، توسط كاپیتان كشتی به آب پرتاب شد چرا كه وی تصور می كرد این موجود ساخته شیطان است.
▪ سال ۱۷۳۸ م:
ژاك دواكانسن (Jacques de Vaucanson) یك اردك مكانیكی ساخت كه از بیش از ۴۰۰۰ قطعه تشكیل شده بود.
این اردك می توانست از خود صدا تولید كند، شنا كند، آب بنوشد، دانه بخورد و آن را هضم و سپس دفع كند. امروزه در مورد محل نگهداری این اردك اطلاعی در دست نیست.
▪ سال ۱۸۰۵ م:
عروسكی توسط میلاردت (Maillardet) ساخته شد كه می توانست به زبان انگلیسی و فرانسوی بنویسد و مناظری را نقاشی كند.
▪ سال ۱۹۲۳ م:
كارل چاپك (Karel Capek) برای اولین بار از كلمه روبات (robot) در نمایشنامه خود به عنوان آدم مصنوعی استفاده كرد. كلمه روبات از كلمه چك robota گرفته شده است كه به معنی برده و كارگر مزدور است. موضوع نمایشنامه چاپك، كنترل انسانها توسط روباتها بود، ولی او هرگونه امكان جایگزینی انسان با روبات و یا اینكه روباتها از احساس برخوردار شوند، عاشق شوند، یا تنفر پیدا كنند را رد می كرد.
▪ سال ۱۹۴۰ م:
شركت وستینگهاوس (Westinghouse Co.) سگی به نام اسپاركو (Sparko) ساخت كه هم از قطعات مكانیكی و هم الكتریكی در ساخب آن استفاده شده بود. این اولین باری بود كه از قطعات الكتریكی نیز همراه با قطعات مكانیكی استفاده می شد.
▪ سال ۱۹۴۲ م:
كلمه روباتیك (robatics) اولین بار توسط ایزاك آسیموف در یك داستان كوتاه ارائه شد. ایزاك آسیموف (۱۹۲۰-۱۹۹۲) نویسنده كتابهای توصیفی درباره علوم و داستانهای علمی تخیلی است.
▪ دهه ۱۹۵۰ م:
تكنولوژی كامپیوتر پیشرفت كرد و صنعت كنترل متحول شد. سؤلاتی مطرح شدند. مثلاً: آیا كامپیوتر یك روبات غیر متحرك است؟
▪ سال ۱۹۵۴ م:
عصر روبات ها با ارائه اولین روبات آدم نما توسط جرج دوول (George Devol) شروع شد.
امروزه، ۹۰% روباتها، روباتهای صنعتی هستند، یعنی روباتهایی كه در كارخانه ها، آزمایشگاهها، انبارها، نیروگاهها، بیمارستانها، و بخشهای مشابه به كارگرفته می شوند.در سالهای قبل، اكثر روباتهای صنعتی در كارخانه های خودروسازی به كارگرفته می شدند، ولی امروزه تنها حدود نیمی از روباتهای موجود در دنیا در كارخانه های خودروسازی به كار گرفته می شوند.مصارف روباتها در همه ابعاد زندگی انسان به سرعت در حال گسترش است تا كارهای سخت و خطرناك را به جای انسان انجام دهند.برای مثال امروزه برای بررسی وضعیت داخلی رآكتورها از روبات استفاده می شود تا تشعشعات رادیواكتیو به انسانها صدمه نزند.
▪ سال ۱۹۵۶ م:
پس از توسعه فعالیتهای تكنولوژی یك كه بعد از جنگ جهانی دوم، یك ملاقات تاریخی بین جورج سی.دوول(George C.Devol) مخترع و كارآفرین صاحب نام، و ژوزف اف.انگلبرگر (Joseph F.Engelberger) كه یك مهندس با سابقه بود، صورت گرفت. در این ملاقات آنها به بحث در مورد داستان آسیموف پرداختند. ایشان سپس به موفقیتهای اساسی در تولید روباتها دست یافتند و با تأسیس شركتهای تجاری، به تولید روبات مشغول شدند. انگلبرگر شركت Unimate برگرفته از Universal Automation را برای تولید روبات پایه گذاری كرد. نخستین روباتهای این شركت در كارخانه جنرال موتورز (General Motors) برای انجام كارهای دشوار در خودروسازی به كار گرفته شد. انگلبرگر را "پدر روباتیك" نامیده اند.
▪ دهه ۱۹۶۰ م:
روباتهای صنعتی زیادی ساخته شدند. انجمن صنایع روباتیك این تعریف را برای روبات صنعتی ارائه كرد:
"روبات صنعتی یك وسیلهٔ چند كاره و با قابلیت برنامه ریزی چند باره است كه برای جابجایی قطعات، مواد، ابزارها یا وسایل خاص بوسیلهٔ حركات برنامه ریزی شده، برای انجام كارهای متنوع استفاده می شود."
▪ سال ۱۹۶۲ م:
شركت خودروسازی جنرال موتورز نخستین روبات Unimate را در خط مونتاژ خود به كار گرفت.
▪ سال ۱۹۶۷ م:
رالف موزر (Ralph Moser) از شركت جنرال الكتریك (General Electeric) نخستین روبات چهارپا را اختراع كرد.
▪ سال ۱۹۸۳ م:
شركت Odetics یك روبات شش پا ارائه كرد كه می توانست از موانع عبور كند و بارهای سنگینی را نیز با خود حمل كند.
▪ سال ۱۹۸۵ م:
نخستین روباتی كه به تنهایی توانایی راه رفتن داشت در دانشگاه ایالتی اهایو (Ohio State Uneversity) ساخته شد.
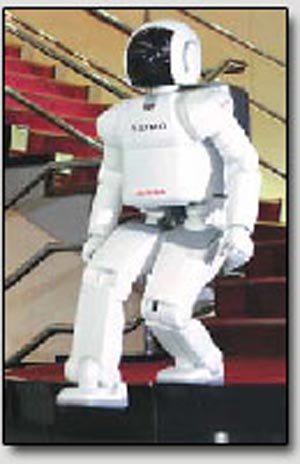
▪ سال ۱۹۹۶ م:
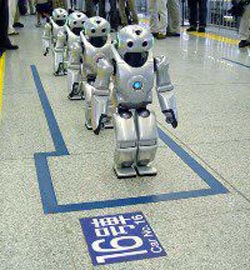
شركت ژاپنی هندا (Honda) نخستین روبات انسان نما را ارائه كرد كه با دو دست و دو پا طوری طراحی شده بود كه می توانست راه برود، از پله بالا برود، روی صندلی بنشیند و بلند شود و بارهایی به وزن ۵ كیلوگرم را حمل كند
روباتها روز به روز هوشمندتر می شوند تا هرچه بیشتر در كارهای سخت و پر خطر به یاری انسانها بیایند.
● قانون روباتیك مطرح شده توسط آسیموف:
۱) روبات ها نباید هیچگاه به انسانها صدمه بزنند.
۲) روباتهاباید دستورات انسانها را بدون سرپیجی از قانون اوّل اجرا كنند.
۳) روباتها باید بدون نقض قانون اوّل و دوم از خود محافظت كنند.
● انواع ربات ها :
رباتهای امروزی كه شامل قطعات الكترونیكی و مكانیكی هستند در ابتدا به صورت بازوهای مكانیكی برای جابجایی قطعات و یا كارهای ساده و تكراری كه موجب خستگی و عدم تمركز كارگر و افت بازده میشد بوجود آمدند. اینگونه رباتها جابجاگر (manipulator) نام دارند.جابجاگرها معمولا در نقطه ثابت و در فضای كاملا كنترل شده در كارخانه نصب میشوند و به غیر از وظیفه ای كه به خاطر آن طراحی شده اند قادر به انجام كار دیگری نیستند. این وظیفه میتواند در حد بسته بندی تولیدات, كنترل كیفیت و جدا كردن تولیدات بی كیفیت, و یا كارهای پیچیده تری همچون جوشكاری و رنگزنی با دقت بالا باشد.
نوع دیگر رباتها كه امروزه مورد توجه بیشتری است رباتهای متحرك هستند كه مانند رباتهای جابجا كننده در محیط ثابت و شرایط كنترل شده كار نمیكنند. بلكه همانند موجودات زنده در دنیای واقعی و با شرایط واقعی زندگی میكنند و سیر اتفاقاتی كه ربات باید با انها روبرو شود از قبل مشخص نیست. در این نوع ربات هاست كه تكنیك های هوش مصنوعی میبایست در كنترلر ربات(مغز ربات) به كار گرفته شود.
▪ رباتهای متحرك به دسته های زیر تقسیم بندی میشوند:
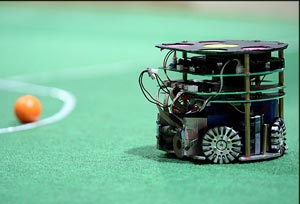
۱) رباتهای چرخ دار با انواع چرخ عادی و یا شنی تانك و با پیكربندی های مختلف یك, دو یا چند قسمتی
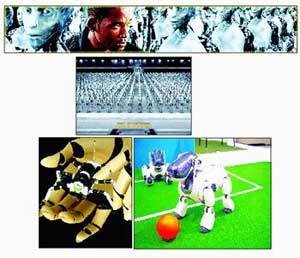
۲) رباتهای پادار مثل سگ اسباب بازیAIBO ساخت سونی كه در شكل بالا نشان داده شد یا ربات ASIMO ساخت شركت هوندا
۳) رباتهای پرنده
۴) رباتهای چند گانه(هایبرید) كه تركیبی از رباتهای بالا یا تركیب با جابجاگرها هستند
● مزایای روباتها:
۱) روباتیك و اتوماسیون در بسیاری از موارد می توانند ایمنی، میزان تولید، بهره و كیفیت محصولات را افزایش دهند.
۲) روباتها می توانند در موقعیت های خطرناك كار كنند و با این كار جان هزاران انسان را نجات دهند.
۳) روباتها به راحتی محیط اطراف خود توجه ندارند و نیازهای انسانی برای آنها مفهومی ندارد. روباتها هیچگاه خسته نمی شوند.
۴) دقت روباتها خیلی بیشتر از انسانها است آنها در حد میلی یا حتی میكرو اینچ دقت دارند.
۵) روباتها می توانند در یك لحظه چند كار را با هم انجام دهند ولی انسانها در یك لحظه تنها یك كار انجام می دهند.
● معایب روباتها:
۱) روباتها در موقعیتهای اضطراری توانایی پاسخگویی مناسب ندارند كه این مطلب می تواند بسیار خطرناك باشد.
۲) روباتها هزینه بر هستند.
۳) قابلیت های محدود دارند یعنی فقط كاری كه برای آن ساخته شده اند را انجام می دهند.
منبع : شبکه فیزیکی هوپا




همچنین مشاهده کنید





































































































نمایندگی زیمنس ایران فروش PLC S71200/300/400/1500 | درایو …
دریافت خدمات پرستاری در منزل
pameranian.com
پیچ و مهره پارس سهند
خرید میز و صندلی اداری
خرید بلیط هواپیما
گیت کنترل تردد
آمریکا دولت مجلس شورای اسلامی مجلس شورای نگهبان حجاب دولت سیزدهم جمهوری اسلامی ایران انتخابات افغانستان گشت ارشاد رئیس جمهور
سلامت شورای شهر تهران هواشناسی شورای شهر تهران شهرداری تهران پلیس قتل فضای مجازی سیل کنکور وزارت بهداشت
دلار ارز قیمت خودرو قیمت دلار مالیات خودرو بازار خودرو بانک مرکزی قیمت طلا مسکن تورم ایران خودرو
سریال پیمان معادی تئاتر تلویزیون فیلم سینمای ایران سینما بازیگر موسیقی سریال پایتخت ازدواج
سازمان سنجش خورشید
اسرائیل غزه رژیم صهیونیستی فلسطین جنگ غزه روسیه اوکراین حماس ترکیه نوار غزه عراق ایالات متحده آمریکا
فوتبال استقلال پرسپولیس ایران فوتسال تیم ملی فوتسال ایران بازی سپاهان باشگاه پرسپولیس جام حذفی آلومینیوم اراک تراکتور
هوش مصنوعی اپل آیفون تبلیغات فناوری ناسا گوگل سامسونگ نخبگان
خواب موز بارداری دندانپزشکی آلزایمر روغن حیوانی