سه شنبه, ۲۵ اردیبهشت, ۱۴۰۳ / 14 May, 2024
مجله ویستا
روباتیک
علاوه براین، ممكن است حسگرها و تجهیزات جانبی یا ابزاری را كه فرمان داشته باشد بعضی از روباتها، ماشینهای مكانیكی نسبتا ساده ای هستند كه كارهای اختصاصی مانند جوشكاری و یا رنگ افشانی را انجام می دهند. كه سایر سیستم های پیچیده تر كه بطور همزمان چند كار انجام می دهند، از دستگاههای حسی، برای جمع آوری اطلاعات مورد نیاز برای كنترل كارشان نیاز دارند. حسگرهای یك روبات ممكن است بازخورد حسی ارائه دهند، طوریكه بتوانند اجسام را برداشته و بدون آسیب زدن، در جای مناسب قرار دهند.
روبات دیگری ممكن است دارای نوعی دید باشد. كه عیوب كالاهای ساخته شده را تشخیص دهد. بعضی از روباتهای مورد استفاده در ساخت مدارهای الكترونیكی، پس از مكان یابی دیداری علامتهای تثبیت مكان بر روی برد، می توانند اجزا بسیار كوچك را در جای مناسب قرار دهند. ساده ترین شكل روباتهای سیار، برای رساندن نامه در ساختمانهای اداری یا جمع آوری و رساندن قطعات در ساخت، دنبال كردن مسیر یك كابل قرار گرفته در زیر خاك یا یك مسیر رنگ شده كه هرگاه حسگرهایشان در مسیر، یا فردی را پیدا كنند متوقف می شوند.
روباتهای بسیار پیچیده تر رد محیط های نامعین تر مانند معادن استفاده می شود. روباتها همانند كامپیوترها قابلیت برنامه ریزی دارند. بسته به نوع برنامه ای كه شما به آنها می دهید. كارها و حركات مختلفی را انجام می دهند.
رشته دانشگاهی نیز تحت عنوان روباتیك وجود دارد. كه به مسایلی از قبیل سنسورها، مدارات ، فیدبكها، پردازش اطلاعات وبست وتوسعه روباتها می پردازد. روباتها انواع مختلفی دارند از قبیل روباتهای شمشیرباز، دنبال كننده خط،كشتی گیر، فوتبالیست، و روباتهای خیلی ریز تحت عنوان میكرو روباتها، روباتهای پرنده وغیره نیز وجود دارند.
روباتها برای انجام كارهای سخت ودشواری كه بعضی مواقع انسانها از انجام آنها عاجز یا انجام آنها برای انسان خطرناك هستند. مثل روباتهایی كه در نیروگاههای هسته ای وجود دارند، استفاده می شوند. كاری كه روباتها انجام می دهند، توسط میكرو پروسسرها(microprocessors) ومیكروكنترلرها (microcontroller) كنترل می شود. با تسلط در برنامه نویسی این دو می توانید دقیقا همان كاری را كه انتظار دارید روبات انجام دهد.
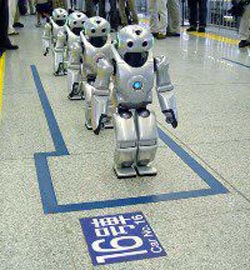
روباتهایی شبیه انسان (human robotic)نیز ساخته شده اند. ، آنها قادرند اعمالی شبیه انسان را انجام دهند. حتی بعضی از آنها همانند انسان دارای احساسات نیز هستند. بعضی از آنها شكلهای خیلی ساده ای دارند. آنها دارای چرخ یا بازویی هستند كه توسط میكرو كنترلرها یا میكرو پرسسرها كنترل می شوند. در واقع میكروكنترلر یا میكرو پروسسر به مانند مغز انسان در روبات كار می كند. برخی از روباتها مانند انسانها و جانوران خون گرم در برخورد و رویارویی با حوادث و مسایل مختلف به صورت هوشمند از خود واكنش نشان می دهند. یك نمونه از این روباتها روبات مامور است.
برخی روباتها نیز یكسری كارها را به صورت تكراری با سرعت ودقت بالا انجام می دهند مثل روبات هایی كه در كارخانه های خودروسازی استفاده می شوند. این گونه روبات كارهایی از قبیل جوش دادن بدنه ماشین ، رنگ كردن ماشین را با دقتی بالاتر از انسان بدون خستگی و وقفه انجام می دهند.
ممكن است روزی فرا برسد كه روباتها جای انسانها را در انجام كارها بگیرند. حتی بعضی از آنها ممكن است به صورت محافظ شخصی از جان انسانها در مقابل خطرات احتمالی حفاظت كنند.
● آناتومی اندام روبات های شبیه انسان
در سال ۱۹۵۰ دانشمندان تصمیم گرفتند. شكلی از روباتهای دو پارا درست كنند. كه از لحاظ فیزیكی شبیه انسان باشند. این گونه روباتها متشكل از دو بازو دو پا هستند كه دستها و پاها به صورت متقارن و شبیه بدن انسان در سمت راست و چپ روبات قرار گرفته اند. برای انجام چنین كاری آنها می بایست در ابتدا آناتومی بدن خود را می شناختند. آنها معتقد بودند كه انسانها طی میلیونها سال تكامل یافته اند. ، تا اینكه امروزه قادرند انواع مختلفی از كارها را انجام دهند. اگر از مردم راجع به روباتهای شبیه انسان سوال كنید.
آنها در اولین وهله به یاد فیلم پلیس آهنی می افتند. حركت در روبات هنگامی كه شما راجع به مطلبی فكر می كنید و برای آن دنبال پاسخ می گردید. می توانید جواب خود را در طبیعت بگیرید. به حیواناتی كه اطراف ما هستند و مانند ما می توانند در چهار جهت حركت كنند. دقت كنید. به طور مثال به حركت فیل توجه كنید.
مفاصلی كه در پاها وجود دارند. سبب حركت پاها به سمت عقب، جلو، چپ و راست می شوند هنگامی كه این حیوان حركت می كند وزن خود را بر روی پاهایش تقسیم می كند. بنابراین این امكان را دارد كه تعادلش را حفظ كند و بر روی زمین نیافتد. در روباتها نیز همین مسأله وجود دارد اگر یكی از پاهای آن در هوا قرار بگیرد روبات متوقف می شود.
واین امكان وجود دارد بر روی زمین بیافتد. به حركت مورچه ها دقت كنید. این موجود ۶ پا دارد. در هنگام حركت به سمت جلو سه پایش را به سمت جلو وسه پای دیگرش را در همان موقعیت به سمت عقب فشار می دهد . دو پا از یك طرف ویك پا از طرف دیگر همواره كار مشتركی را انجام می دهند. و این كار سبب حركت مورچه به سمت جلو می شود. حشرات بدلیل داشتن پاهای بیشتر و فرم پاها راحت تر از حیوانات چهار پا می توانند تعادل خود را در حركت حفظ كنند. به همین دلیل روباتهای شبیه حشرات بیشتر از روباتهایی شبیه سگ و گربه ساخته شده اند.
● لگو روبات(lego robot)
برای شروع به ساخت روبات بهتر است كه با لگو ها و نحوه اسمبل كردن آنها آشنا شوید. لگوها ایده های خوبی در ساخت روبات به شما می دهند. بسیاری از روباتهایی كه ساخته شده اند. حشره، حیوان، انسان نیستند بلكه آنها لگو هستند. شما می توانید بدنه روبات خود را بوسیله لگوها بسازید و مدارات الكترونیك را در آن جا سازی كنید.
بیشتر ماشینهایی كه وجود دارند از چهار چرخ تشكیل شده اند. دو چرخ جلویی دارای چرخش زاویه ای هستند، و دو چرخ عقبی در جای خود ثابت هستند وتنها می چرخند، حركت به سمت راست، جلو و عقب را چرخهای جلویی تعیین می كنند. در برخی از ماشینها هر چهار چرخ دارای این وضعیت هستند.
از این موارد در ساخت لگو روباتها شبیه ماشین استفاده می شود. برخی از ماشینهای پیشرفته از راه دور كنترل می شوند(remote control) كه این مسأله را براحتی می توان در روباتها بست و توسعه داد. برای ساخت یك لگو ماشین احتیاج به چهار چرخ پلاستیكی و دو میله تحت عنوان محور احتیاج دارید. شاید بتوانید این قطعات را براحتی در یك ماشین اسباب بازی پیدا كنید. برخی از طراحان روبات به جای چهار چرخ از سه چرخ استفاده می كنند.
در این حالت عموما دو چرخ ثابت وتنها در جای خود می چرخند و تنها یك چرخ دارای حركت آزاد است. نوع دو چرخ آن نیز وجود دارد. در این حالت هر دوچرخ دارای حركت آزاد زاویه ای هستند. برای حل مشكل تعادل روباتها در هنگام چرخش از چهار چرخ استفاده می شود. در هر طرف دو چرخ وجود دارد كه چرخهای در هر سمت بوسیله تسمه یا نواری پلاستیكی به هم متصل می شوند.
منبع : روزنامه ابرار اقتصادی




























































































































































نمایندگی زیمنس ایران فروش PLC S71200/300/400/1500 | درایو …
دریافت خدمات پرستاری در منزل
پیچ و مهره پارس سهند
تعمیر جک پارکینگ
خرید بلیط هواپیما
ایران آمریکا قوه قضاییه رهبر انقلاب شورای نگهبان مجلس مجلس شورای اسلامی صادق زیباکلام حجاب انتخابات مجلس انتخابات مجلس دوازدهم
هواشناسی تهران پلیس بارش باران شهرداری تهران دستگیری قتل سیل سازمان هواشناسی سلامت زلزله وزارت بهداشت
قیمت دلار قیمت خودرو خودرو قیمت طلا بازار خودرو بورس سایپا مسکن بانک مرکزی حقوق بازنشستگان گاز دلار
همایون شجریان نمایشگاه کتاب فضای مجازی نمایشگاه کتاب تهران کتاب شاهنامه سینمای ایران نمایشگاه بینالمللی کتاب تهران دفاع مقدس تلویزیون سریال رضا عطاران
وزارت علوم دانشگاه تهران تحقیقات و فناوری
اسرائیل رژیم صهیونیستی غزه فلسطین جنگ غزه حماس روسیه افغانستان ترکیه نوار غزه اوکراین طالبان
استقلال فوتبال پرسپولیس فولاد خوزستان لیگ برتر فولاد مهدی طارمی رئال مادرید باشگاه استقلال لیگ برتر ایران لیگ برتر فوتبال ایران بازی
هوش مصنوعی فناوری گوگل تبلیغات نوآوری شفق قطبی ناسا اپل دبی
خواب زیبایی شیر تجهیزات پزشکی درمان ناباروری واکسن فشار خون