دوشنبه, ۱۰ اردیبهشت, ۱۴۰۳ / 29 April, 2024
مجله ویستا
روبوتها، انساننماها
امروزه گسترش استفاده از روبوت در مكان ها و جاهایی كه امكان حضور انسان نیست به حدی زیاد شده كه منجر به بیكاری شمار زیادی از كارگران نیز شده است به علاوه در كارهای صنعتی و تحقیقاتی حضور روبوت ها را بیش از پیش می توان شاهد بود.
دانشمندان علم رباتیك تعاریف زیادی را برای روبوت مطرح كرده اند اما در یك تعریف كلی می توان روبوت را این گونه تعریف كرد: ماشین خودكار چند منظوره ای كه طیف گسترده ای از وظایف متفاوت را در شرایطی كه حتی نسبت به آن شرایط شناخت كافی نداشته باشد مانند انسان انجام می دهد. اما در یك تعریف عام تر و كلی تر ربات یك ماشین الكترومكانیكی هوشمند است كه دارای خصوصیات زیر است:
۱) قابلیت برنامه ریزی مكرر دارد.
۲) چندكاره است. (Multi Tasking)
۳) كارآمد و مناسب برای محیط است و توانایی هماهنگ كردن خود را با محیط دارد.
● تاریخچه روبوت
لغت روبوت نخستین بار در سال ۱۹۲۰ تا ۱۹۳۰ در نمایشنامه ای به نام (Ross muse universal Robot) نوشته كارل كاپك نویسنده اهل چك به كار برده شد، در این نمایشنامه بازیگران نقش موجوداتی مصنوعی و كوچك شبیه به انسان را بازی می كردند كه تحت فرمان صاحب خود قرار داشتند و دستورهایش را دقیقاً اجرا می كردند، در این نمایشنامه این بازیگران را روبوت می نامیدند كه در زبان اسلاو به معنای كارگر اجباری است.
اما عده ای از دانشمندان بر این باورند كه تاریخچه پیدایش روبوت ها به قبل از میلاد مسیح(ع) بازمی گردد ـ یعنی در سال ۲۷۰ قبل از میلاد مسیح(ع) ـ زمانی كه یونانیان به ساخت مجسمه های متحرك می پرداختند و پس از آن در سال ۱۲۵۰ میلادی، آلبرتوس ماگنوس در یك میهمانی از مدعوین خود توسط ماشین هایی كه حركت می كردند پذیرایی به عمل آورد.
در سال ۱۷۳۸ میلادی دواكانسن یك اردك مكانیكی ساخت كه از ۴۰۰۰ قطعه تشكیل شده بود كه می توانست شنا كند و از خود صدا دربیارود. در گذر زمان اتفاقات فراوانی برای تبدیل روبوت های اولیه به شكل امروزی به وقوع پیوسته است كه در زیر فهرست وار به آنها اشاره شده است:
▪ ۱۹۳۸: نخستین الگوی قابل برنامه ریزی كه یك دستگاه سم پاشی بود، توسط دو آمریكایی طراحی شد.
▪ ۱۹۴۲: رمان ایزاك آسیموف با نام Runaround منتشر شد كه در آن قوانین سه گانه رباتیك معرفی شد.
▪ ۱۹۴۶: ظهور رایانه های نسل اول
▪ ۱۹۵۱: طراحی نخستین بازوی مفصلی با قابلیت كنترل از راه دور
▪ ۱۹۵۴: طراحی نخستین روبوت قابل برنامه ریزی
▪ ۱۹۵۹: راه اندازی نخستین آزمایشگاه هوش مصنوعی در جهان
▪ ۱۹۶۳: راه اندازی دومین آزمایشگاه هوش مصنوعی در دانشگاه استنفورد
▪ ۱۹۶۸: طراحی یك روبوت سیار با قابلیت بینایی و كنترل توسط یك رایانه
▪ ۱۹۷۳: تولید نخستین مینی رایانه با قابلیت استفاده تجاری
▪ ۱۹۷۶: به كارگیری روبوت vicarm در كاوشگر فضایی وایكینگ
▪ ۱۹۸۶: راه اندازی خط تولید روبوت های الكتریكی در كارخانه كاوازاكی
▪ ۱۹۹۷: دریافت نخستین تصاویر ارسالی از روبوت راه یاب مریخ
▪ ۲۰۰۰: پرده برداری از روبوت شبیه انسان توسط شركت سونی
▪ ۲۰۰۱: دومین نسل از روبوت های سگ Aibo عرضه شد.
▪ ۲۰۰۱: سیستم كنترل از راه دور ایستگاه فضایی SSRMS ساخته و در مدار زمین قرار گرفت.
● دسته بندی تاریخی روبوت ها
در یك دسته بندی تاریخی می توان روبوت ها را به سه نسل تقسیم كرد كه هر نسل نسبت به نسل قبل از خود كامل تر شده است و پیشرفت های چشمگیری نیز داشته است.
۱) نسل صفر:
در این نسل روبوت ها قابلیت هیچ گونه برنامه پذیری را نداشتند، روبوت های این نسل را روبوت های برنامه ناپذیر نیز می گویند.
۲) نسل اول:
روبوت های نسل اول دارای محرك های قابل كنترل اند و توانایی تكرار یك برنامه را به صورت متناوب دارند. كاربرد عمده این روبوت ها در كارهای صنعتی مانند خطوط مونتاژ است. روبوت های این نسل را روبوت های برنامه پذیر نیز می نامند.
۳) نسل دوم:
روبوت های این نسل نسبت به نسل های گذشته خود كامل تر شدند و دارای سیستم بینایی هستند كه به كارگیری نرم افزارهای مخصوص توانایی پردازش داده های ورودی را دارند، یعنی در واقع این روبوت ها از نوعی هوش مصنوعی بهره می برند و با استفاده از این قابلیت، توانایی تصمیم گیری را نیز دارند، روبوت های این نسل را روبوت های سازگار می گویند.
● دسته بندی روبوت ها
در تعریف روبوت ها عنوان شد كه روبوت دارای خاصیت تنوع عملكرد و قابلیت تطبیق خودكار خود با محیط است. براین اساس، دسته بندی زیر با توجه به ۲ خصوصیت یاد شده روبوت ها از سوی دانشمندان رباتیك انجام گرفته است.
▪ روبوت هایی كه توسط دست كنترل می شوند.
▪ روبوت هایی برای كارهای متوالی بدون تغییر.
▪ روبوت هایی برای كارهای متوالی با تغییر.
▪ روبوت های تقلیدكننده.
▪ روبوت های كنترل كننده.
▪ روبوت های دارای هوش.
● كاربردهای صنعتی روبوت ها
كاربردهای صنعتی روبوت ها را می توان به دسته بندی های زیر تقسیم كرد:
۱) حمل مواد، تخلیه و بارگیری:
در این حالت روبوت ها، كار كارگران معمولی را انجام داده و به جابه جا كردن مواد و قطعات از جایی به جای دیگر می پردازند.
۲) كاربردهای فرایندی:
در این حالت، كار روبوت ها اندكی پیچیده تر شده و به كارهای تخصصی تر مانند جوشكاری، رنگ پاشی و نیز عملیاتی كه در آنها وظیفه روبوت كاربرد ابزاری خاص برای انجام برخی كارهای تولیدی در كارخانه است.
۳) مونتاژ و بازرسی:
در این حالت عملیات مونتاژ قطعات خاصی از خط تولید و نیز عملیات بازرسی با استفاده از حساسه ها به وسیله روبوت انجام می شود.
● اجزای تشكیل دهنده روبوت ها
هر روبوت به طور معمول از ۵ بخش متفاوت اما مرتبط با یكدیگر تشكیل می شود كه عبارتند از:
۱) AMS) Articulated Mecanical system):
این سیستم متشكل از بازوها، مچ ها، اتصالات و عوامل نهایی مكانیكی است كه در یك مجموعه به هم پیوسته و مرتبط جمع شده اند در حقیقت تشكیل یك سیستم مكانیكی منفصل شده را می دهند.
۲) Actuators:
وظیفه این بخش فراهم كردن توان لازم در یك سری شرایط كنترل شده و دقیق برای سیستم مكانیكی منفصل شده (AMS) است. این بخش را تحریك كننده ها نیز می نامند.
۳) Transmission system:
وظیفه این بخش اتصال Actuators (تحریك كننده ها) به AMS است كه از این راه توان فراهم شده توسط تحریك كننده ها به بخش مكانیكی منتقل می شود و امكان حركت را برای مفصل ها و بازو ها به شكل مجزا فراهم می آورد - تسمه ها و چرخ دنده ها از این دسته اند - این بخش را ابزار ها وسیستم های انتقال می گویند.
۴) sensors:
حسگر ها قطعاتی هستند كه از ابزارهای لامسه ای الكتریكی یا نوری در كنار سایر عناصر الكتریكی انجام وظیفه می كنند. وظیفه این حسگر ها كسب اطلاعات از موقعیت اجزای روبوت مانند مفصل ها و بازو ها و نیز محیط بیرونی روبوت مانند نور، گرما و هدف های موردنظر روبوت است.
۵) cpu:
این بخش كه در حقیقت به عنوان مغز روبوت انجام وظیفه می كند محلی برای دستور دادن و تصمیم گیری روبوت است. در این بخش اطلاعات دریافتی از حسگر ها تجزیه و تحلیل شده و دستورهای لازم به مفاصل و بازو ها فرستاده می شود.
● انواع روبوت ها
روبوت های امروزی كه از قطعات الكترونیكی و مكانیكی تشكیل شده اند در ابتدا تنها به صورت بازوهای مكانیكی برای جابه جایی قطعات و مواداولیه و نیز كارهای تكراری به وجود آمدند كه به این روبوت ها جابه جاگر (manipulator) می گفتند، جابه جاگر ها معمولاً در یك نقطه ثابت و در فضایی كنترل شده نصب شده و تنها قادر به انجام وظیفه یاد شده بودند.
نوع دیگری از روبوت ها كه امروزه مورد توجه قرار گرفته اند روبوت های متحرك هستند كه برخلاف روبوت های جابه جاگر ثابت نبوده و در محیط حركت می كنند. در این نوع از روبوت ها با استفاده از هوش مصنوعی در مغز روبوت قابلیت برنامه ریزی برای آن فراهم شده است. روبوت های متحرك به سه دسته تقسیم می شوند.
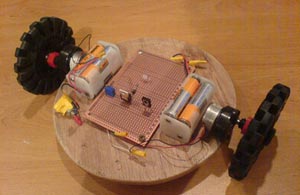
۱) روبوت های چرخ دار: این دسته از روبوت های متحرك دارای چرخ های عادی و یا شنی تانك و یا دارای پیكربندی های چندبخشی هستند.
۲) روبوت های پادار: این گروه از روبوت ها دارای پا بوده و بر روی ۲ یا ۴ پا حركت می كنند.
۳) روبوت های پرنده: این گروه از روبوت های متحرك در هوا به حركت درمی آیند.
● مزایای روبوت
۱) افزایش ایمنی، میزان تولید، صرفه جویی و كیفیت محصولات.
۲) كار در شرایط خطرناك و سخت مانند كوره ها، معادن، ارتفاعات و جاهایی كه حضور انسان در آنجا بسیار مشكل است.
۳) خسته نشدن روبوت ها و نیز بی توجهی به محیط پیرامون خود.
۴) داشتن دقت بالا در حد میكروسانتی متر برای انجام كارها.
۵) انجام چند كار در یك زمان
۶) انجام كارهای تكراری و خسته كننده
وحید نقشینه
منبع : روزنامه ایران




همچنین مشاهده کنید







































































































نمایندگی زیمنس ایران فروش PLC S71200/300/400/1500 | درایو …
دریافت خدمات پرستاری در منزل
pameranian.com
پیچ و مهره پارس سهند
خرید میز و صندلی اداری
خرید بلیط هواپیما
گیت کنترل تردد
مجلس شورای اسلامی مجلس دولت شورای نگهبان حجاب مجلس یازدهم دولت سیزدهم جمهوری اسلامی ایران انتخابات افغانستان رئیس جمهور گشت ارشاد
تهران شورای شهر دستگیری هواشناسی شورای شهر تهران شهرداری تهران پلیس قتل سیل فضای مجازی کنکور وزارت بهداشت
دلار قیمت دلار خودرو مالیات قیمت خودرو بانک مرکزی بازار خودرو قیمت طلا مسکن تورم ایران خودرو سایپا
تلویزیون سریال تئاتر زنان فیلم مست عشق سینمای ایران سینما ازدواج موسیقی سریال پایتخت بازیگر
خورشید
رژیم صهیونیستی فلسطین غزه اسرائیل آمریکا جنگ غزه روسیه اوکراین حماس ترکیه نوار غزه عراق
فوتبال پرسپولیس تیم ملی فوتسال ایران ایران استقلال فوتسال بازی باشگاه پرسپولیس سپاهان جام حذفی آلومینیوم اراک تراکتور
هوش مصنوعی اپل وزارت علوم آیفون ماه تبلیغات فناوری ناسا گوگل نخبگان مریخ
خواب موز افسردگی کاهش وزن بارداری دندانپزشکی آلزایمر روغن حیوانی