سه شنبه, ۲۵ اردیبهشت, ۱۴۰۳ / 14 May, 2024
مجله ویستا
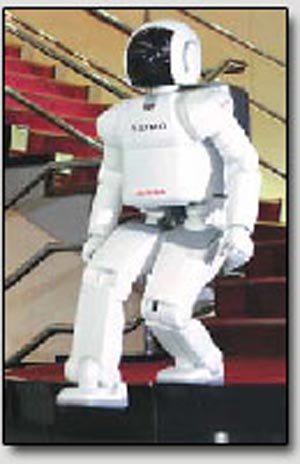
خلاصه ای از ساختار رباتها
لغت ربات در اکثر زبانهای دنیا با همین تلفظ دارای معنای واحدی میباشد. این لغت اولینبار در خلال سالهای ۱۹۲۰ تا ۱۹۳۰ در نمایشنامهای با نام "RUR (Rossmuse Universal Robot)" نوشته "کارل کاپک" نویسنده چکاسلواکی بهکار برده شد. در این نمایشنامه بازیگران نقش موجوداتی مصنوعی و کوچک شبیه انسان را بازی میکردند، که بهطور مطلق تحت فرمان صاحب خود قرار داشته و دستوراتش را موبهمو اجرا میکردند. این موجودات ربات نامیده میشدند که ریشه آن از لغت اسلاو (یعنی اسلواکییایی!) Robota به معنای "کارگر اجباری" است.
● قوانین ربوتیک
در سال ۱۹۴۰،Issac Assimov سه قانون Roobtics را به شرح زیر تبیین کرد:
۱) یک ربات موجودی است که نباید به انسان آزار برساند و اجازه ندهد به چیزی ضرر برسد.
۲) باید از انسان اطاعت کند، مگر این که با قانون اول مغایرت داشته باشد.
۳) باید خودش را در برابر خطر و ضرر محافظت نماید، مگر اینکه با قانون اول و دوم مغایرت داشته باشد.
● دستهبندی رباتها
رباتها در سطوح مختلف دارای دو خاصیت "تنوع در عملکرد" و "قابلیت تطبیق خودکار با محیط" (automated adapting) میباشند. بر اساس این دو خاصیت دستهبندی رباتها انجام میگیرد.
▪ دستهبندی اتحادیه رباتهای ژاپنی(jira) به شرح زیر است:
۱) وسیلهای که توسط دست کنترل میشود.
۲) ربات برای کارهای متوالی بدون تغییر
۳) ربات برای کارهای متوالی متغیر
۴) ربات مقلد
۵) ربات کنترل
۶) ربات باهوش
که در دستهبندی موسسه رباتیک آمریکا(RIA)، فقط ماشینهای دسته ۳ تا ۶، ربات محسوب میشوند.
● ساختار عمومی یک ربات
یک ربات بهطور معمول حداقل شامل ۵ بخش متفاوت ولی مرتبط میباشد:
ـ Articulated Mechanical system : AMS
(سیستم مکانیکی مفصل شده):
این سیستم متشکل از بازوها، مچها، اتصالات و عوامل نهایی مکانیکی بوده که در یک مجموعه به هم پیوسته و مرتبط جمع شدهاند.
ـ Actuators
(تحریککنندهها):
این بخش توان لازم را تحت یک سری شرایط کنترل شده و دقیق، برای سیستم مکانیکی مفصل شده(AMS) فراهم میکند.
این توان از انواع الکتریکی، هیدرولیکی و یا نیوماتیکی* میباشد.
ـ Transmission system
(ابزارها و سیستمهای انتقال):
این مجموعه Actuators را به AMS اتصال میدهد. بدین طریق توان فراهم شده توسط تحریککنندهها به بخش مکانیکی منتقل شده و بهگونهای مجزا امکان حرکت را برای هر مفصل فراهم میآورد. تسمههای دندهدار و چرخدندهها از این نوعند.
ـ Sensors
(حسگرها):
سنسورها قطعاتی هستند متشکل از ابزارهای لامسهای الکتریکی یا نوری که در کنار سایر عناصر الکترونیکی ایفای نقش میکنند. وظیفه این المانها کسب اطلاعاتی از موقعیت مفاصل ربات و شرایط محیطی مانند نور و گرما و هدفهای موجود در محیط میباشد.
ـ CPU
(مغز ربات):
این بخش بهعنوان محلی برای دستور گرفتن و تصمیمگیری ربات میباشد. بهعبارت دیگر، وظیفه پردازش اطلاعات دریافتی از سنسورها بر عهده این بخش است که این وظیفه توسط برنامههای موجود در حافظه کامپیوتر به انجام میرسد. بخش نرمافزار هم مربوط به این قسمت است.
● برنامهنویسی در ربات
برنامه نویسی در ربات به دو صورت Online و Offline انجام میشود.
برنامهنویسی Online که امروزه به عنوان معمولترین روش در بهکارگیری رباتهای صنعتی استفاده می شود، اپراتور حرکتهای مورد نظر را به ربات آموزش میدهد، بهگونهای که ربات بعدا میتواند بدون کمک و بهطور خودکار همان کارها را تکرار کند. این نوع از برنامهنویسی به دو صورت انجام میشود:
۱) آموزش دستی
۲) آموزش از طریق هدایت.
در روش دستی با کمک یک جعبه کنترلی، ربات را به نقاط مورد نظر هدایت کرده و مختصات آنها در حافظه کامپیوتری ربات ثبت میشود و به این ترتیب برای دفعات بسیار قابل تکرار است. در روش هدایت، عامل نهایی را با دست در مسیر دلخواه حرکت داده و وضعیت پیوسته هر یک از محورها در حافظ ربات ثبت میشود.
اما در مورد برنامهنویسی Offline که به برنامهنویسی سطح بالا موسوم است، این نکته اهمیت دارد که وقتی انجام کارهای پیچیده مورد نظر است و یا سرعت واکنش ربات به وقایع خارجی اهمیت دارد، باید از زبان های "کنترلکننده" رباتها استفاده کرد. در این زبانها علاوه بر وجود دستورات معمولی از قبیل کنترل حلقه و یا عبارات شرطی، دستوراتی برای حرکت و جابهجایی رباتها هم در نظر گرفته شده است. این نوع برنامهنویسی امکان ارتباط آسانتر با ربات را فراهم میآورد.
● تقسیمبندی تاریخی رباتها
الف) رباتهای برنامهناپذیر یا رباتهای نسل صفر
ب) رباتهای برنامهپذیر یا رباتهای نسل اول: این نوع رباتها دارای محرکهای قابل کنترلاند که توان تکرار یک برنامه را به این ترتیب دارا هستند. از این رباتها در کاربردهای صنعتی مانند خطوط مونتاژ ساده استفاده میشود.
ج) رباتهای آداپتیو یا رباتهای نسل دوم: این رباتها به سیستم بینایی نیز مجهزند و عملا با بهکارگیری نرمافزارهای خاص که توانایی پردازش دادههای میکروپروسسوری را دارند، نوعی هوشمصنوعی برای ربات فراهم میسازند که قابلیت تصمیمگیری برای آنها امکانپذیر میشود.
● سنسورها در ربات:
در اتوماسیون سخت(Hard Automation) که درآن یک ماشین وظیفه مشخص را همانگونه که در صنعت مورد نیاز است انجام میدهد، نیازی به هوشمند بودن سیستم نیست. اما برای رسیدن به اتوماسیون هوشمند (Intelligent Automation) به دو جز کلیدی نیازمندیم: هوشمصنوعی و سیستم سنسوری.
به کمک این دو میتوان به رباتهای صنعتی با کاربردهایی در نقاشی، جوشکاری، حملونقل و مونتاژ رسید که قدرت انجام کارهای پیچیده، تشخیص و تفکیک را دارا هستند.
سنسورها اغلب برای درک اطلاعات تماسی، تنشی، مجاورتی، بینایی و صوتی بهکار میروند. عملکرد سنسورها بدینگونه است که با توجه به تغییرات فاکتوری که نسبت به آن حساس هستند، سطوح ولتاژی ناچیزی را در پاسخ ایجاد میکنند، که با پردازش این سیگنالهای الکتریکی میتوان اطلاعات دریافتی را تفسیر کرده و برای تصمیمگیریهای بعدی از آنها استفاده نمود.
سنسورها را میتوان از دیدگاههای مختلف به دستههای متفاوتی تقسیم که در ذیل میآید:
۱) سنسور محیطی: این سنسورها اطلاعات را از محیط خارج و وضعیت اشیای اطراف ربات، دریافت مینمایند.
۲) سنسور بازخورد: این سنسور اطلاعات وضعیت ربات، از جمله موقعیت بازوها، سرعت حرکت و شتاب آنها و نیروی وارد بر درایورها را دریافت مینمایند.
۳) سنسور فعال: این سنسورها هم گیرنده و هم فرستنده دارند و نحوه کار آنها بدین ترتیب است که سیگنالی توسط سنسور ارسال و سپس دریافت میشود.
۴) سنسور غیرفعال: این سنسورها فقط گیرنده دارند و سیگنال ارسال شده از سوی منبعی خارجی را آشکار میکنند، به همین دلیل ارزانتر، سادهتر و دارای کارایی کمتر هستند.
منبع : حامد منصف





















































































































































نمایندگی زیمنس ایران فروش PLC S71200/300/400/1500 | درایو …
دریافت خدمات پرستاری در منزل
پیچ و مهره پارس سهند
تعمیر جک پارکینگ
خرید بلیط هواپیما
ایران آمریکا قوه قضاییه رهبر انقلاب شورای نگهبان مجلس مجلس شورای اسلامی صادق زیباکلام حجاب انتخابات مجلس انتخابات مجلس دوازدهم
هواشناسی تهران پلیس بارش باران شهرداری تهران دستگیری قتل سیل سازمان هواشناسی سلامت زلزله وزارت بهداشت
قیمت دلار قیمت خودرو خودرو قیمت طلا بازار خودرو بورس سایپا مسکن بانک مرکزی حقوق بازنشستگان گاز دلار
همایون شجریان نمایشگاه کتاب فضای مجازی نمایشگاه کتاب تهران کتاب شاهنامه سینمای ایران نمایشگاه بینالمللی کتاب تهران دفاع مقدس تلویزیون سریال رضا عطاران
وزارت علوم دانشگاه تهران تحقیقات و فناوری
اسرائیل رژیم صهیونیستی غزه فلسطین جنگ غزه حماس روسیه افغانستان ترکیه نوار غزه اوکراین طالبان
استقلال فوتبال پرسپولیس فولاد خوزستان لیگ برتر فولاد مهدی طارمی رئال مادرید باشگاه استقلال لیگ برتر ایران لیگ برتر فوتبال ایران بازی
هوش مصنوعی فناوری گوگل تبلیغات نوآوری شفق قطبی ناسا اپل دبی
خواب زیبایی شیر تجهیزات پزشکی درمان ناباروری واکسن فشار خون